- Навигационные промахи: Как мы научились предсказывать и предотвращать ошибки в пути
- Источники ошибок в навигационных системах
- Методы расчета ошибок навигации
- Статистический анализ
- Фильтр Калмана
- Метод Монте-Карло
- Аналитическое моделирование
- Экспериментальные измерения
- Практическое применение методов расчета ошибок
- Современные тенденции и будущие направления
Навигационные промахи: Как мы научились предсказывать и предотвращать ошибки в пути
Все мы когда-либо терялись. Будь то в незнакомом городе, в лесу или даже в собственном доме, чувство дезориентации неприятно. Но когда речь заходит о навигации в авиации, морском деле или космосе, ошибки могут иметь катастрофические последствия. На протяжении многих лет мы, как инженеры и ученые, неустанно работали над тем, чтобы понять, как возникают эти ошибки и как их можно предсказать и предотвратить. Эта статья ⸺ наш опыт, наши неудачи и победы на этом пути.
Навигация, по сути, это искусство и наука определения и поддержания желаемого курса. Она включает в себя сбор информации о местоположении, скорости и направлении движения, а также принятие решений о том, как скорректировать курс для достижения цели. Но ни одна система не идеальна. В каждой есть свои погрешности, свои слабые места, которые могут привести к отклонению от намеченного пути.
Источники ошибок в навигационных системах
Ошибки в навигационных системах могут возникать из множества источников. Некоторые из них связаны с ограничениями самой аппаратуры, другие ⸺ с внешними факторами, такими как погодные условия или помехи. Давайте рассмотрим основные категории:
- Ошибки датчиков: Гироскопы, акселерометры, GPS-приемники ⸺ все они имеют определенную точность. Даже самые современные датчики подвержены дрейфу, шуму и систематическим ошибкам.
- Ошибки моделирования: Навигационные системы часто используют математические модели для прогнозирования движения и положения. Если эти модели неточны или не учитывают все факторы, это может привести к ошибкам.
- Внешние помехи: Атмосферные явления, электромагнитные помехи, намеренные глушения GPS-сигнала ‒ все это может повлиять на точность навигационных систем.
- Человеческий фактор: Ошибки ввода данных, неправильная интерпретация информации, усталость ⸺ человеческий фактор также играет важную роль в навигации.
Чтобы понять, как бороться с этими ошибками, мы должны научиться их измерять и оценивать.
Методы расчета ошибок навигации
Расчет ошибок навигации ⸺ это сложная задача, требующая использования различных математических и статистических методов. Мы рассмотрим несколько ключевых подходов:
Статистический анализ
Этот подход основан на сборе большого количества данных и анализе их статистических характеристик. Мы можем использовать эти данные для оценки среднего значения ошибки, ее стандартного отклонения и других параметров, которые позволяют нам понять, насколько велика неопределенность в наших измерениях. Одним из ключевых инструментов здесь является фильтр Калмана.
Фильтр Калмана
Фильтр Калмана ⸺ это мощный алгоритм, который позволяет нам объединять информацию из различных источников (например, датчиков и моделей) для получения более точной оценки состояния системы. Он особенно полезен в ситуациях, когда данные зашумлены или неполны. Фильтр Калмана работает итеративно, предсказывая состояние системы на следующем шаге и затем корректируя эту оценку на основе новых измерений. Этот процесс позволяет нам постепенно уменьшать неопределенность и получать все более точные результаты.
Метод Монте-Карло
Метод Монте-Карло ⸺ это численный метод, который использует случайные числа для моделирования различных сценариев и оценки вероятности различных исходов. В контексте навигации мы можем использовать метод Монте-Карло для моделирования ошибок датчиков и других источников неопределенности и оценки влияния этих ошибок на точность навигационной системы. Этот метод особенно полезен в ситуациях, когда аналитическое решение недоступно или слишком сложно.
Например, мы можем создать тысячи или миллионы симуляций, каждая из которых представляет собой немного отличающийся сценарий с разными значениями ошибок датчиков. Затем мы можем проанализировать результаты этих симуляций, чтобы оценить вероятность того, что навигационная система отклонится от намеченного курса на определенное расстояние. Это позволяет нам определить, насколько надежна наша система и какие области требуют улучшения.
Аналитическое моделирование
Этот подход основан на создании математических моделей, которые описывают поведение навигационной системы и ее подверженность различным видам ошибок. Мы можем использовать эти модели для аналитического расчета ошибок и определения факторов, которые оказывают наибольшее влияние на точность навигации. Аналитическое моделирование может быть сложным, но оно позволяет нам получить глубокое понимание системы и разработать эффективные стратегии для снижения ошибок.
Например, мы можем разработать математическую модель, которая описывает, как ошибки гироскопа влияют на точность определения ориентации объекта. Затем мы можем использовать эту модель для расчета максимальной ошибки ориентации, которую можно ожидать при заданных параметрах гироскопа. Это позволяет нам выбрать подходящий гироскоп для конкретной задачи и разработать алгоритмы компенсации ошибок.
"Точность ‒ вежливость королей." ‒ Людовик XVIII
Экспериментальные измерения
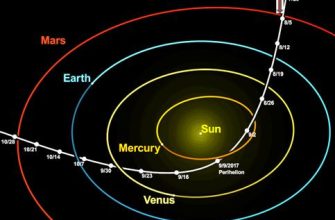
Несмотря на все теоретические расчеты и моделирование, ничто не заменит реальных испытаний. Мы проводим множество экспериментов, чтобы проверить точность наших навигационных систем в различных условиях. Эти эксперименты могут включать в себя полеты на самолетах, плавание на кораблях или поездки на автомобилях. Мы собираем данные о местоположении, скорости и ориентации и сравниваем их с эталонными значениями, чтобы оценить ошибки навигации.
Экспериментальные измерения позволяют нам выявить недостатки в наших моделях и алгоритмах, а также оценить влияние внешних факторов, которые трудно учесть теоретически. Например, мы можем обнаружить, что на точность GPS-приемника влияет наличие высоких зданий или деревьев. Эта информация может быть использована для разработки алгоритмов, которые компенсируют эти эффекты.
Практическое применение методов расчета ошибок
Все эти методы расчета ошибок навигации имеют широкое применение в различных областях. Вот несколько примеров:
- Авиация: Расчет ошибок навигации необходим для обеспечения безопасного и точного полета самолетов. Он используется для разработки систем автоматической посадки, систем предотвращения столкновений и других критически важных приложений.
- Морское дело: Расчет ошибок навигации важен для безопасной навигации судов в открытом море и в узких проливах. Он используется для разработки систем автоматического управления судном, систем мониторинга положения и других приложений.
- Космонавтика: Расчет ошибок навигации критически важен для управления космическими аппаратами и спутниками. Он используется для определения орбиты, ориентации и положения космического аппарата, а также для выполнения точных маневров.
- Автомобильная промышленность: Расчет ошибок навигации используется для разработки систем автономного вождения и систем помощи водителю. Он позволяет автомобилям точно определять свое местоположение и двигаться по заданному маршруту без участия человека.
Современные тенденции и будущие направления
Область навигации постоянно развивается. Мы видим появление новых технологий и методов, которые позволяют нам добиваться все большей точности и надежности. Вот несколько ключевых тенденций:
- Интеграция датчиков: Вместо того, чтобы полагаться на один тип датчика, мы видим все больше систем, которые объединяют информацию из нескольких источников, таких как GPS, инерциальные датчики, камеры и лидары. Это позволяет нам компенсировать недостатки каждого отдельного датчика и получать более точную и надежную оценку состояния системы.
- Использование искусственного интеллекта: Алгоритмы машинного обучения и глубокого обучения используются для анализа больших объемов данных и выявления закономерностей, которые позволяют нам улучшить точность и надежность навигационных систем. Например, мы можем использовать нейронные сети для фильтрации шума в данных датчиков или для прогнозирования будущей траектории движения.
- Развитие квантовой навигации: Квантовые датчики, такие как квантовые гироскопы и акселерометры, обещают значительное улучшение точности и стабильности по сравнению с традиционными датчиками. Хотя эта технология все еще находится на ранней стадии развития, она имеет огромный потенциал для революции в области навигации.
Мы верим, что будущее навигации будет характеризоваться все большей интеграцией, интеллектуализацией и автоматизацией. Мы будем продолжать работать над тем, чтобы создавать все более точные, надежные и безопасные навигационные системы, которые помогут нам исследовать мир и решать самые сложные задачи.
Подробнее
| Точность навигационных систем | Оценка ошибок GPS | Фильтр Калмана применение | Инерциальная навигация недостатки | Методы компенсации ошибок датчиков |
|---|---|---|---|---|
| Анализ погрешностей гироскопа | Статистическая обработка данных навигации | Моделирование ошибок акселерометра | Квантовая навигация перспективы | Автономные системы навигации |