- Путешествие сквозь космос на ионном ветру: Как мы рассчитывали траектории с низким удельным импульсом
- Что такое низкий удельный импульс и почему он важен?
- Математическое моделирование траекторий с ионными двигателями
- Учет гравитационного воздействия небесных тел
- Оптимизация траектории: поиск оптимального решения
- Численное моделирование и его особенности
- Выбор шага интегрирования и его влияние на точность
- Валидация модели и сравнение с аналитическими решениями
- Сложности и решения при расчете траекторий с низким удельным импульсом
- Вычислительная сложность и оптимизация алгоритмов
- Чувствительность к начальным условиям и робастное управление
- Перспективы использования ионных двигателей в будущем
Путешествие сквозь космос на ионном ветру: Как мы рассчитывали траектории с низким удельным импульсом
Мечта о межзвездных путешествиях всегда будоражила наше воображение. Но как добраться до далеких звезд‚ когда привычные ракетные двигатели оказываются слишком неэффективными для таких огромных расстояний? Ответ‚ как это часто бывает‚ лежит в инновациях и новых технологиях. В этой статье мы расскажем о нашем опыте расчета траекторий космических аппаратов‚ использующих ионные двигатели – двигатели с низким удельным импульсом‚ но способные работать непрерывно‚ разгоняя корабль до невероятных скоростей.
Мы погрузимся в мир математических моделей‚ численных методов и тонкостей космической механики. Расскажем о трудностях‚ с которыми столкнулись‚ и о решениях‚ которые помогли нам преодолеть эти препятствия. Приготовьтесь к захватывающему путешествию в мир расчетов траекторий‚ где физика‚ математика и программирование сливаются воедино‚ чтобы приблизить нас к звездам.
Что такое низкий удельный импульс и почему он важен?
Удельный импульс (Isp) – это мера эффективности ракетного двигателя. Он показывает‚ сколько тяги двигатель создает на единицу расхода топлива. Высокий удельный импульс означает‚ что двигатель использует топливо более эффективно и может доставить больше полезной нагрузки на заданное расстояние. Традиционные химические ракетные двигатели имеют высокий удельный импульс‚ но ограничены количеством топлива‚ которое можно взять на борт.
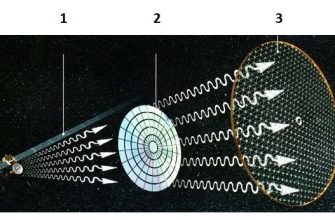
Ионные двигатели‚ напротив‚ имеют очень низкий удельный импульс по сравнению с химическими. Это означает‚ что они создают очень небольшую тягу в любой момент времени. Однако‚ их главное преимущество заключается в невероятно высокой эффективности использования топлива. Они могут работать непрерывно в течение месяцев или даже лет‚ постепенно разгоняя космический аппарат до огромных скоростей. Представьте себе‚ что вы медленно‚ но неуклонно толкаете гигантский шар – в конце концов‚ он наберет значительную скорость. Именно этот принцип лежит в основе ионных двигателей.
Этот тип двигателей открывает двери для межпланетных и даже межзвездных миссий‚ которые были бы невозможны с использованием только химических ракет. Благодаря длительной работе и высокой топливной эффективности‚ ионные двигатели позволяют нам достигать далеких целей с меньшими затратами топлива и большей полезной нагрузкой.
Математическое моделирование траекторий с ионными двигателями
Расчет траекторий с учетом тяги низкого удельного импульса – задача нетривиальная. Это сложная оптимизационная проблема‚ требующая учета множества факторов‚ таких как гравитационное воздействие небесных тел‚ положение и скорость космического аппарата‚ характеристики двигателя и ограничения по времени и ресурсам. Мы использовали комплексный подход‚ сочетающий аналитические методы с численным моделированием.
Основу нашей модели составляли уравнения движения‚ описывающие изменение положения и скорости космического аппарата под действием гравитационных сил и тяги двигателя. Эти уравнения – нелинейные дифференциальные уравнения‚ которые не имеют аналитического решения. Поэтому нам пришлось прибегнуть к численным методам‚ таким как метод Рунге-Кутты‚ для их решения. Этот метод позволяет нам с высокой точностью отслеживать движение космического аппарата во времени‚ учитывая все действующие на него силы.
Кроме того‚ нам необходимо было оптимизировать траекторию‚ чтобы минимизировать расход топлива и время полета. Для этого мы использовали различные алгоритмы оптимизации‚ такие как генетические алгоритмы и методы градиентного спуска. Эти алгоритмы позволяют нам находить оптимальные параметры траектории‚ такие как направление и величина тяги двигателя в каждый момент времени‚ которые позволяют нам достичь цели с минимальными затратами.
Учет гравитационного воздействия небесных тел
Гравитационное воздействие небесных тел‚ таких как Солнце‚ Земля‚ Луна и другие планеты‚ играет ключевую роль в формировании траектории космического аппарата. Мы использовали модель‚ учитывающую гравитационное воздействие всех значимых небесных тел в Солнечной системе. Это позволило нам точно предсказывать движение космического аппарата и учитывать влияние гравитационных маневров‚ которые могут быть использованы для изменения траектории и экономии топлива.
Гравитационные маневры – это хитрый способ использования гравитации планет для изменения скорости и направления движения космического аппарата. Подлетая к планете‚ космический аппарат может использовать ее гравитационное поле‚ чтобы "разогнаться" или "замедлиться"‚ а также изменить направление своего движения. Эти маневры могут значительно сократить расход топлива и время полета‚ особенно при межпланетных перелетах.
Оптимизация траектории: поиск оптимального решения
Оптимизация траектории – это поиск оптимальных параметров траектории‚ которые позволяют достичь цели с минимальными затратами топлива и времени. Это сложная задача‚ требующая использования специальных алгоритмов оптимизации. Мы экспериментировали с различными алгоритмами‚ такими как генетические алгоритмы и методы градиентного спуска‚ чтобы найти наиболее эффективное решение.
Генетические алгоритмы имитируют процесс естественного отбора в природе. Они начинают с создания популяции случайных траекторий‚ а затем постепенно улучшают их‚ отбирая наиболее "приспособленные" траектории‚ которые лучше всего удовлетворяют заданным критериям (минимальный расход топлива‚ минимальное время полета). Методы градиентного спуска‚ с другой стороны‚ используют информацию о градиенте целевой функции (расхода топлива‚ времени полета) для поиска минимума. Они постепенно изменяют параметры траектории в направлении‚ в котором целевая функция уменьшается.
"Космос – это не предел. Предел – это то‚ что мы сами себе устанавливаем." ⸺ Уолли Фанк
Численное моделирование и его особенности
Численное моделирование – это неотъемлемая часть процесса расчета траекторий с использованием ионных двигателей. Оно позволяет нам точно отслеживать движение космического аппарата во времени‚ учитывая все действующие на него силы и ограничения. Мы использовали специализированное программное обеспечение для численного моделирования‚ которое позволяет нам решать сложные дифференциальные уравнения и визуализировать результаты.
Одним из ключевых аспектов численного моделирования является выбор подходящего шага интегрирования. Слишком большой шаг интегрирования может привести к неточностям и даже к нестабильности решения. Слишком маленький шаг интегрирования‚ с другой стороны‚ может потребовать слишком много вычислительных ресурсов и времени. Мы тщательно подбирали шаг интегрирования‚ чтобы обеспечить высокую точность и эффективность моделирования.
Также важным аспектом является валидация модели. Мы сравнивали результаты численного моделирования с аналитическими решениями и экспериментальными данными‚ чтобы убедиться в ее точности и надежности. Это позволило нам выявить и исправить ошибки в модели и повысить уверенность в ее результатах.
Выбор шага интегрирования и его влияние на точность
Как мы уже упоминали‚ выбор шага интегрирования критически важен для точности численного моделирования. Мы использовали адаптивный шаг интегрирования‚ который автоматически подстраивается под сложность траектории. В областях‚ где траектория меняется быстро‚ шаг интегрирования уменьшается‚ чтобы обеспечить высокую точность. В областях‚ где траектория меняется медленно‚ шаг интегрирования увеличивается‚ чтобы снизить вычислительные затраты.
Мы также провели серию экспериментов‚ чтобы оценить влияние шага интегрирования на точность результатов. Мы запускали моделирование с разными шагами интегрирования и сравнивали полученные траектории. Это позволило нам определить оптимальный шаг интегрирования‚ который обеспечивает баланс между точностью и вычислительными затратами.
Валидация модели и сравнение с аналитическими решениями
Валидация модели – это проверка ее точности и надежности. Мы сравнивали результаты численного моделирования с аналитическими решениями для простых случаев‚ таких как движение под действием только гравитационной силы Солнца. Мы также сравнивали результаты моделирования с экспериментальными данными‚ полученными в ходе реальных космических миссий.
Например‚ мы сравнивали наши результаты с данными миссии Dawn‚ которая использовала ионные двигатели для исследования астероидов Веста и Церера. Это позволило нам убедиться‚ что наша модель адекватно описывает движение космических аппаратов с ионными двигателями в реальных условиях.
Сложности и решения при расчете траекторий с низким удельным импульсом
Расчет траекторий с низким удельным импульсом сопряжен с рядом сложностей. Во-первых‚ это высокая вычислительная сложность задачи. Необходимо решать сложные дифференциальные уравнения и оптимизировать траекторию в многомерном пространстве параметров. Во-вторых‚ это чувствительность результатов к начальным условиям. Небольшие изменения в начальном положении и скорости космического аппарата могут привести к значительным изменениям в траектории.
Чтобы справиться с этими сложностями‚ мы использовали мощные вычислительные ресурсы и разрабатывали эффективные алгоритмы оптимизации. Мы также использовали методы робастного управления‚ которые позволяют минимизировать влияние неопределенностей и ошибок на траекторию.
Вычислительная сложность и оптимизация алгоритмов
Для снижения вычислительной сложности мы использовали параллельные вычисления. Мы разделили задачу на несколько подзадач‚ которые решались одновременно на разных процессорах. Это позволило нам значительно ускорить процесс расчета траекторий.
Мы также оптимизировали алгоритмы оптимизации‚ используя методы‚ которые позволяют быстро находить оптимальные решения. Например‚ мы использовали методы квази-Ньютона‚ которые позволяют эффективно искать минимум целевой функции‚ используя информацию о ее градиенте и гессиане.
Чувствительность к начальным условиям и робастное управление
Чтобы уменьшить чувствительность к начальным условиям‚ мы использовали методы робастного управления; Эти методы позволяют разрабатывать траектории‚ которые устойчивы к неопределенностям и ошибкам. Мы использовали алгоритмы‚ которые позволяют находить траектории‚ которые остаются близкими к оптимальным даже при небольших изменениях в начальных условиях.
Мы также использовали методы адаптивного управления‚ которые позволяют корректировать траекторию в процессе полета‚ чтобы компенсировать ошибки и неопределенности. Эти методы позволяют нам гарантировать‚ что космический аппарат достигнет своей цели‚ даже если произойдут непредвиденные события.
Перспективы использования ионных двигателей в будущем
Ионные двигатели открывают новые горизонты для исследования космоса. Они позволяют нам достигать далеких планет и астероидов с меньшими затратами топлива и большей полезной нагрузкой. В будущем ионные двигатели могут быть использованы для межпланетных перелетов‚ строительства космических станций и даже для колонизации других планет.
Развитие ионных двигателей – это важный шаг на пути к освоению космоса. Мы верим‚ что в будущем ионные двигатели станут основным типом двигателей для космических аппаратов‚ и помогут нам расширить наше присутствие в космосе.
Подробнее
| Траектории ионных двигателей | Расчет космических траекторий | Низкий удельный импульс | Ионные двигатели в космосе | Моделирование космических полетов |
|---|---|---|---|---|
| Оптимизация траекторий | Гравитационные маневры | Численное моделирование космоса | Эффективность ионных двигателей | Межпланетные перелеты |