- Расчет траекторий с учетом реактивной тяги: Наш опыт покорения космоса (в миниатюре)
- Первые шаги: Теория и подготовка
- Выбор инструментов: Язык программирования и библиотеки
- Упрощения и допущения: Модель идеального мира
- Реализация модели: Код и алгоритмы
- Учет реактивной тяги: Главный вызов
- Визуализация результатов: Траектории на экране
- Тестирование и отладка: Поиск ошибок в коде
Расчет траекторий с учетом реактивной тяги: Наш опыт покорения космоса (в миниатюре)
Приветствуем вас‚ дорогие читатели! Сегодня мы хотим поделиться с вами захватывающим опытом‚ который‚ возможно‚ покажется вам выходящим за рамки обыденности. Речь пойдет о расчете траекторий космических аппаратов‚ и‚ что особенно важно‚ об учете реактивной тяги. Да‚ это звучит как что-то из учебника по астрофизике‚ но поверьте‚ мы постараемся рассказать об этом максимально простым и увлекательным языком.
Мы не профессиональные космонавты и не сотрудники NASA. Мы ⎯ группа энтузиастов‚ увлеченных космосом и программированием. И в один прекрасный день нам пришла в голову идея: а что‚ если попробовать смоделировать полет космического аппарата‚ учитывая все основные факторы‚ влияющие на его траекторию? Идея казалась безумной‚ но мы решили попробовать. И вот‚ что из этого вышло.
Первые шаги: Теория и подготовка
Прежде чем броситься в омут программирования‚ нам пришлось освежить в памяти основы небесной механики. Законы Ньютона‚ закон всемирного тяготения‚ концепция импульса и реактивной тяги – все это стало нашим настольным чтением. Мы изучили множество статей и учебников‚ чтобы понять‚ как именно рассчитать траекторию космического аппарата‚ учитывая гравитационное воздействие различных небесных тел и‚ конечно же‚ реактивную тягу двигателей.
Самым сложным было понять‚ как правильно учесть изменение массы аппарата при работе двигателей. Ведь‚ как известно‚ топливо расходуется‚ и масса аппарата уменьшается. Это‚ в свою очередь‚ влияет на ускорение‚ которое он получает от реактивной тяги. Мы потратили немало времени‚ чтобы разобраться в этих тонкостях и вывести правильные формулы.
Выбор инструментов: Язык программирования и библиотеки
После того‚ как теоретическая база была усвоена‚ пришло время выбирать инструменты. Нам нужен был язык программирования‚ достаточно мощный и гибкий‚ чтобы реализовать наши сложные расчеты. После некоторых раздумий мы остановились на Python. Этот язык обладает богатой экосистемой библиотек для научных вычислений‚ что значительно упростило нашу задачу.
В частности‚ мы использовали библиотеки NumPy для работы с массивами и векторами‚ SciPy для решения дифференциальных уравнений и Matplotlib для визуализации результатов. Эти инструменты оказались незаменимыми помощниками в нашей работе.
Упрощения и допущения: Модель идеального мира
Понимая‚ что создать абсолютно точную модель полета космического аппарата практически невозможно‚ мы решили пойти по пути упрощения; Мы отказались от учета множества факторов‚ таких как сопротивление атмосферы (на начальном участке полета)‚ солнечный ветер‚ релятивистские эффекты и т.д. Мы сосредоточились на основных факторах: гравитации и реактивной тяге.
Кроме того‚ мы предположили‚ что двигатели аппарата работают идеально‚ выдавая постоянную тягу в заданном направлении. Это‚ конечно‚ далеко от реальности‚ но для наших целей такое упрощение было вполне допустимым.
Реализация модели: Код и алгоритмы
Теперь‚ когда у нас была вся необходимая теоретическая база и инструменты‚ мы приступили к написанию кода. Нашей целью было создать программу‚ которая могла бы рассчитать траекторию космического аппарата‚ задав начальные условия (положение‚ скорость‚ масса) и параметры двигателей (тяга‚ удельный импульс).
Основным алгоритмом‚ который мы использовали‚ был метод Рунге-Кутты четвертого порядка. Это численный метод решения дифференциальных уравнений‚ который позволяет с достаточной точностью рассчитать положение и скорость аппарата в каждый момент времени.
- Шаг 1: Задаем начальные условия.
- Шаг 2: Рассчитываем гравитационные силы‚ действующие на аппарат.
- Шаг 3: Рассчитываем силу реактивной тяги.
- Шаг 4: Рассчитываем суммарную силу‚ действующую на аппарат.
- Шаг 5: Рассчитываем ускорение аппарата.
- Шаг 6: Используем метод Рунге-Кутты для расчета нового положения и скорости аппарата.
- Шаг 7: Повторяем шаги 2-6 до тех пор‚ пока не будет достигнута конечная точка траектории.
Особое внимание мы уделили учету изменения массы аппарата при работе двигателей. Для этого мы использовали формулу Циолковского‚ которая связывает изменение скорости аппарата с изменением его массы и удельным импульсом двигателей.
"Земля ⎯ колыбель человечества‚ но нельзя вечно жить в колыбели." ― Константин Циолковский
Учет реактивной тяги: Главный вызов
Учет реактивной тяги оказался самым сложным и интересным аспектом нашей работы. Нам нужно было не только рассчитать величину силы тяги‚ но и правильно определить ее направление. Ведь направление тяги может меняться в процессе полета‚ например‚ для корректировки траектории или для ориентации аппарата.
Мы реализовали несколько различных алгоритмов управления тягой‚ от самых простых (постоянное направление тяги) до более сложных (алгоритмы‚ основанные на обратной связи). Один из самых интересных алгоритмов‚ который мы разработали‚ позволял аппарату автоматически корректировать свою траекторию‚ чтобы достичь заданной цели.
Визуализация результатов: Траектории на экране
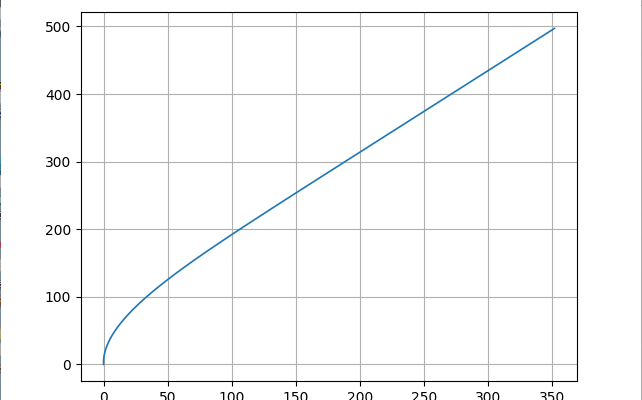
После того‚ как код был написан и отлажен‚ пришло время визуализировать результаты. Мы использовали библиотеку Matplotlib для построения графиков траекторий. Было очень интересно наблюдать‚ как аппарат‚ под действием гравитации и реактивной тяги‚ описывает сложные кривые в пространстве.
Мы создали несколько различных визуализаций‚ включая графики положения аппарата в зависимости от времени‚ графики скорости аппарата в зависимости от времени и 3D-модели траекторий. Эти визуализации помогли нам лучше понять‚ как работают наши алгоритмы и как различные параметры влияют на траекторию полета.
- График положения по оси X от времени.
- График положения по оси Y от времени.
- График скорости по оси X от времени.
- График скорости по оси Y от времени.
- 3D-модель траектории.
Тестирование и отладка: Поиск ошибок в коде
Как и в любом программном проекте‚ тестирование и отладка заняли значительную часть нашего времени. Мы обнаружили множество ошибок в коде‚ от простых опечаток до серьезных логических ошибок. Но благодаря тщательному тестированию и отладке‚ мы смогли исправить все ошибки и убедиться‚ что наша программа работает правильно.
Мы использовали различные методы тестирования‚ включая модульное тестирование‚ интеграционное тестирование и системное тестирование. Мы также проводили ручное тестирование‚ чтобы убедиться‚ что визуализации выглядят правильно и что траектории соответствуют нашим ожиданиям.
Наш проект по расчету траекторий с учетом реактивной тяги оказался невероятно интересным и познавательным. Мы не только углубили свои знания в области небесной механики и программирования‚ но и получили ценный опыт работы в команде. Мы научились решать сложные проблемы‚ находить компромиссы и достигать поставленных целей.
В будущем мы планируем развивать наш проект дальше. Мы хотим добавить учет новых факторов‚ таких как сопротивление атмосферы‚ солнечный ветер и релятивистские эффекты. Мы также хотим разработать более сложные алгоритмы управления тягой и создать более реалистичную модель двигателей. Кто знает‚ может быть‚ когда-нибудь наша программа поможет настоящим космонавтам в их полетах к звездам!
Мы надеемся‚ что наша история вдохновит вас на собственные проекты и исследования. Не бойтесь браться за сложные задачи‚ учитесь новому и делитесь своим опытом с другими. Ведь именно так и рождаются великие открытия!
Подробнее
| Траектория космического аппарата | Реактивная тяга расчет | Моделирование полета в космосе | Python небесная механика | Алгоритмы управления тягой |
| Формула Циолковского применение | Метод Рунге-Кутты космос | Визуализация траекторий Python | Гравитационное воздействие расчет | Программирование космических полетов |